





2.6.3 Калибровка оптической системы регистрации
Получив представление о том, как латеральная сила связана с деформациями кантилевера (см. вывод), обсудим калибровку регистрирующего устройства. Наклоны a и b зеркальной поверхности кантилевера вызывают отклонения отраженного лазерного луча. Световое пятно, попадающее на фотоприемник, при этом смещается вдоль соответствующих взаимно перпендикулярных осей a и b (рис. 1).
 ,
,
 ,
,
(2)
где L – оптическое плечо (расстояние от зеркала до фотодиода). Отличный от нуля вертикальный изгиб балки
( ) приводит к перемещению пятна в направлении a, что создает сигнал DFL, закручивание
(
) приводит к перемещению пятна в направлении a, что создает сигнал DFL, закручивание
( ) – к перемещению в направлении b и сигналу LAT appearance.
) – к перемещению в направлении b и сигналу LAT appearance.
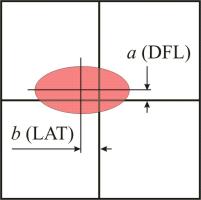
Рис. 1. Смещение пятна на фотоприемнике.
Введем коэффициенты пропорциональности A, B [нА/мкм] между a и DFL, b и LAT:
 ,
,
 .
.
(3)
Здесь следует отметить, что пятно в плоскости фотоприемника может иметь не только некруглую, но и вообще нерегулярную форму и даже нерегулярную интенсивность. Это происходит из-за неточностей фокусировки, дифракции луча на зеркальной поверхности кантилевера и т.п. Тем не менее, при небольших отклонениях a и b (что на практике выполняется практически всегда) соответствующие сигналы DFL и LAT линейны.
Таким образом, A и B - это аппаратные постоянные микроскопа с конкретным установленным кантилевером. Их можно найти, проведя соответствующую калибровку, которая даст возможность пересчитывать значения регистрируемых сигналов DFL и LAT в смещение луча на фотодиоде. Для этого необходимо выяснить величину сигналов при известных отклонениях a и b. Поэтому следует провести следующие вспомогательные измерения. Чтобы создать известные (регулируемые) смещения пятна по поверхности фотоприемника, будем отклонять не луч (как это происходит при деформации кантилевера), а двигать сам фотодиод. Воспользуемся регулировочными микровинтами перемещения приемника, которые используются для юстировки оптической системы.
Зафиксируем луч - пусть он попадает на фотодиод, отражаясь от недеформированного кантилевера. При помощи микровинтов, регулирующих положение фотоприемника, будем перемещать его вдоль взаимно перпендикулярных осей (рис. 2) x и h, отмечая при этом значения сигналов DFL и LAT при каждом шаге винтов.
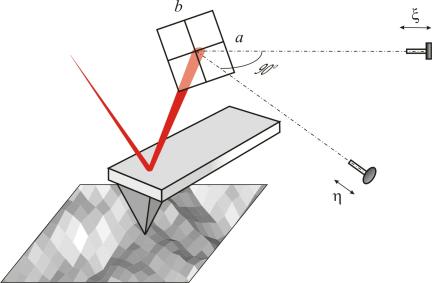
Рис. 2. Оптическая система регистрации.
Таким образом построим две пары графиков: DFL(x), LAT(x) и DFL(h), LAT(h). На рисунке 4 изображена только первая из них.
| Наведите указатель мыши на интересующую область зависимости рисунка 3. | ||||||||||
 |
 |
 |
 |
 |
 |
 |
 |
 |
||
| Рис. 3. Идеализированные зависимости DFL(x), LAT(x). | Рис. 4. Расположение пятна лазерного пучка на приемнике. | |||||||||
Линейное изменение сигналов в районе нуля постепенно сменяется плато, которое соответствует переходу всего пятна в одну из половин фотоприемника. Затем, когда пятно начинает выходить за пределы фотодиодов, сигналы начинают спадать по модулю. Это идеальный случай, на практике из-за нерегулярности пятна графики оказываются сложнее (см. приложение II).
Теперь требуется установить, какие смещения пятна в системе координат фотодиода (оси a и b) происходят при движении винтов x и h. Найдем, например, изменение координаты a пятна при смещении фотоприемника на расстояние x вдоль одноименной оси. Не привязываясь к правдоподобному направлению осей, расположим рисунок 5 так, как нам удобно. Пусть луч падает вертикально на фотоприемник (которому он всегда ортогонален), ось x, вдоль которой смещается фотодиод, направим произвольно. Точки OO'D образуют прямоугольный треугольник.
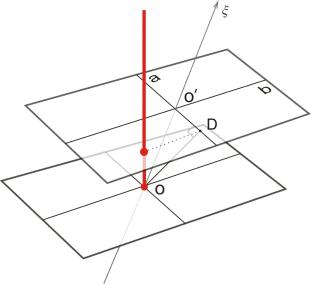
Рис. 5. К формулам (4 - 5).
Таким образом,
 ,
,
 ,
,
(4)
Аналогично,
 ,
,
 .
.
(5)
Значения углов
 ,
,
 ,
,
 ,
,
 зависят от конструкции оптической системы конкретной модели микроскопа и приведены в приложении I.
зависят от конструкции оптической системы конкретной модели микроскопа и приведены в приложении I.
Получив четыре соотношения типа (4 - 5), можно "перемасштабировать" горизонтальные оси графиков (рис. 4). Тангенсы углов наклона линейных участков соответствующих графиков есть калибровочные постоянные A и B. Для проведения калибровки сигналов LAT и DFL, вообще говоря, достаточно одной любой пары графиков, из которых один для DFL, другой для LAT, и, соответственно, понадобятся всего два из четырех упомянутых углов. Однако для некоторых моделей микроскопа один или два графика (из четырех) могут выродиться в горизонтальную прямую и оказаться непригодными для калибровки (см. пример в приложении II DFL(h) = 0).
Чтобы окончательно связать регистрируемый сигнал с латеральной силой, действующей в направлении x, объединим формулы (1), (2), (3), (4). Тогда
(6)
где калибровочная константа B находится по приведенному выше алгоритму, например, по наклону линейного участка графика LAT(x) (рис. 3):
(7)
Количественные оценки константы B и коэффициента перевода условных единиц, используемых в МЛС, в единицы силы приведены приложении II.
Выводы.
- Для количественного определения латеральной силы необходимо провести калибровку оптической системы регистрации микроскопа, которая позволяет пересчитать сигнал LAT в соответствующую силу.
- Для калибровки используются микровинты, юстирующие фотоприемник. Для расчетов необходимо знать характеристики кантилевера, а также воспользоваться справочными данными о конструкции различных моделей микроскопа Solver P47, приведенными в приложении I.