





2.2.8 Прыжковая АСМ
Д.В. Казанцев E-mail: kaza@itep.ru
Принцип работы Прыжковой АСМ
Принцип работы Прыжковой АСМ заключается в последовательном снятии и обработке силовых кривых в каждой точке измерения в процессе сканирования. Для этого расстояние зонд-образец при сканировании изменяется по квазигармоническому закону с частотой порядка кГц. Таким образом, зонд испытывает силовое взаимодействие с образцом тысячи раз в секунду.
Кривая подвода
Зависимость силы изгиба кантилевера, возникающей в результате отталкивания и притяжения острия иглы к исследуемой поверхности, от расстояния игла-поверхность, называется в AFM «кривой подвода». Кривой подвода в STM является зависимость туннельного тока от расстояния «игла-поверхность», в SNOM – зависимость оптического сигнала от расстояния «игла-поверхность».
Потенциальная кривая взаимодействия игла-образец
В атомно-силовом микроскопе взаимодействие острия иглы с поверхностью образца определяется ван-дер-Ваальсовыми силами взаимодействия атомов, образующих материал иглы и образца. На больших межмолекулярных расстояниях превалируют силы притяжения, между тем, по мере сближения иглы с поверхностью образца, при заметном перекрытии электронных облаков основную роль начинают играть силы отталкивания между атомами. В мелких подробностях силы (потенциалы) взаимодействия иглы и образца были исследованы многочисленными группами атомно-силовой микроскопии в середине 1990-х. Проводились точные измерения потенциала взаимодействия для разных объектов: алмазной иглы, кремниевой иглы, платиновой иглы… поверхности кремния, золота, каменной соли, алмаза, графита… Проводились точные расчеты форм электронных облаков над поверхностью кристаллического образца и возле острия кристаллической иглы, как аналитические, так и численными методами… Результаты этих измерений и расчетов можно найти в соответствующих статьях и обзорах тех времен, однако феноменологически потенциал механического взаимодействия острия иглы и поверхности образца можно в целом описать выражением Леннарда-Джонса:
 (1)
(1)
Переменная Zts обозначает тут расстояние игла-поверхность в нормальном к поверхности направлении, α описывает глубину потенциальной ямы. На больших расстояниях Zts основную роль в потенциале играет член  , описывающий притяжение частиц (энергия уменьшается по мере сближения). На малых расстояниях доминирует член
, описывающий притяжение частиц (энергия уменьшается по мере сближения). На малых расстояниях доминирует член  , соответствующий отталкиванию твердой иглы от жесткой поверхности. Расстояние игла-поверхность, на котором силы отталкивания и притяжения равны, описывается переменной σ. Вдобавок к этому потенциалу, на положение иглы влияет еще потенциал упругой деформации кантилевера, на котором сформирована игла:
, соответствующий отталкиванию твердой иглы от жесткой поверхности. Расстояние игла-поверхность, на котором силы отталкивания и притяжения равны, описывается переменной σ. Вдобавок к этому потенциалу, на положение иглы влияет еще потенциал упругой деформации кантилевера, на котором сформирована игла:
 (2)
(2)
где k – постоянная упругости (деформационная жесткость кантилевера в н/м), а Z – отклонение кончика иглы от его положения равновесия.
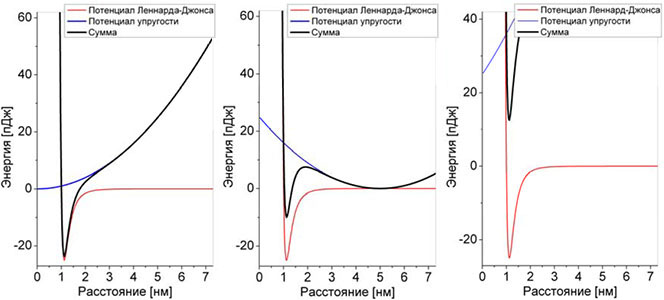
Левый график: недеформированное положение кантилевера точно совпадает с поверхностью.
Средний график: положение равновесия для свободного кантилевера установлено выше поверхности на 5 нм.
Правый график: положение недеформированного кантилевера находится в 5 нм ниже поверхности.
Обе эти кривые (потенциал ван-дер-Ваальсова взаимодействия поверхности образца с остриём иглы, и потенциал упругой деформации кантилевера) показаны на Рис. 1. Графики на этих рисунках построены в координатах, привязанных к поверхности образца. Кривая ван-дер-ваальсова взаимодействия на этих графиках всегда начинается с нуля по горизонтальной оси, а приближение или удаление иглы к образцу описывается горизонтальным перемещением параболы.
При некоторых параметрах (а) параболы упругой жесткости кантилевера и (б) кривой потенциала взаимодействия иглы и поверхности, на суммарной кривой потенциала острия иглы возникает два равноправных минимума. Один из них, расположенный приблизительно на дне параболы, соответствует равновесному положению иглы в полном отсутствии образца. Другой минимум соответствует минимуму потенциала притяжения-отталкивания иглы и поверхности. При умеренной температуре энергия тепловых колебаний кончика кантилевера значительно меньше глубины обеих потенциальных ям, так что игла может устойчиво находиться в любой из них. Положение кончика иглы при последовательном подводе, а затем отводе образца к кантилеверу, показано на Рис. 2. Обратите внимание, на этом рисунке график построен уже в координатах, неподвижных относительно крепления кантилевера, а не поверхности образца. Образец на этой серии кривых имеет переменную координату, сначала приближаясь к игле из бесконечности слева, а затем удаляясь обратно в немыслимую даль.
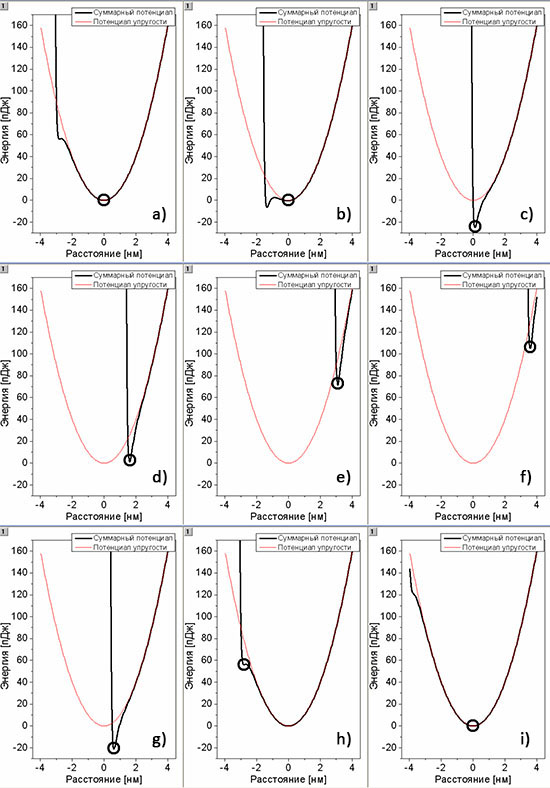
Нетрудно вообразить, при таких условиях, что при подводе к игле образца из бесконечности игла исходно будет находиться в положении своего механического равновесия (Рис. 2(a), Рис. 3(1)). По мере приближения к ней поверхности, кантилевер будет испытывать несильную деформацию в направлении поверхности, оказавшись под действием ветви кривой межмолекулярного взаимодействия, отвечающей за притяжение молекул (Рис. 2(b), Рис. 3(2)). В некоторый момент, по мере приближения поверхности к острию иглы, «ямка» потенциала Леннард-Джонса окажется неподалеку от положения механического равновесия кантилевера с иглой. Игла «свалится» в эту ямку (Рис. 2(c)), и дальнейшее движение поверхности в сторону иглы будет сопровождаться отклонением кантилевера под действием сил отталкивания, практически с коэффициентом Ztip = Zsurf, поскольку левая ветвь ван-дер-ваальсовой кривой очень крутая ((Рис. 2(d,e,f), Рис. 3(3)). Когда прибор начнет отвод образца от иглы, «ямка» ван-дер-ваальсовой кривой окажется для иглы очевидно предпочтительной в смысле энергии, и некоторое время при продолжении отвода игла будет оставаться «прилипшей» к образцу (Рис. 2(h), Рис. 3(4)), как будто его поверхность намазана вареньем. В конце концов, разумеется, небольшой глубины ямки окажется недостаточно для продолжения оттягивания иглы, и кантилевер щелчком перейдет в свободное состояние, когда положение иглы определяется дном параболы (Рис. 2(i), Рис. 3(5)).
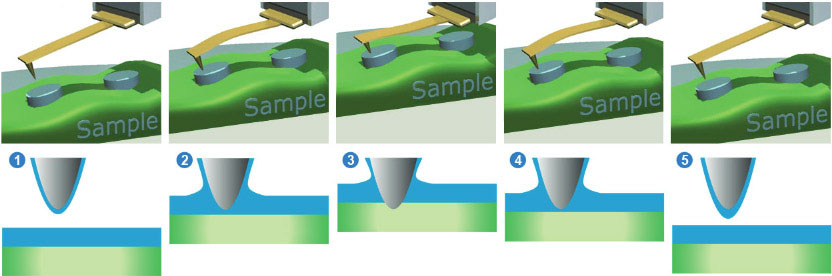
1 – до начала цикла образец отведет от кантилевера, кантилевер не деформирован,
2 – когда при подводе расстояние делается достаточно малым, кантилевер изгибается навстречу поверхности
Таким образом, даже при использовании для описания явления абсолютно консервативных ван-дер-ваальсовых сил (потенциалов) кривая подвода и кривая отвода заметно отличаются друг от друга. Учет капиллярных сил (неизбежных например при исследовании живых клеток), а также сил молекулярной абсорбции в полимерах, «склеивающих» иглу с образцом за время их контакта, делает описание «прилипания» иглы еще более сложным.
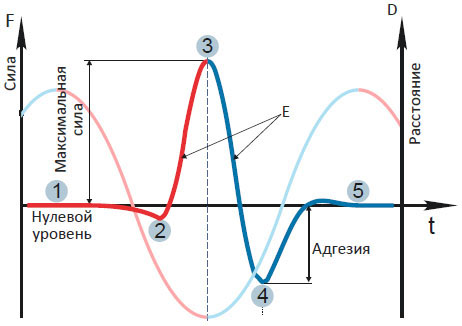
1,5 – базовый уровень (свободное положение недеформированного кантилевера),
2 – минимум силы притяжения (адгезии) при подводе,
3 – максимум отклонения,
4 – минимум силы притяжения (адгезии) при отводе.
Основные этапы цикла измерений в Прыжковой АСМ для идеализированной кривой (1) отклонений зонда показаны на Рис. 4. В начале сближения зонда и образца отклонение кантилевера остается постоянным на базовом уровне (точка 1 на профиле отклонений). Затем под действием адгезионных и капиллярных сил кантилевер загибается вниз (точка 2). При дальнейшем сближении начинают преобладать силы отталкивания, которые вынуждают кантилевер отклоняться вверх до уровня (точка 3), заданного для обратной связи в ходе латерального сканирования. Далее направление движения по координате Z изменяется на противоположное. На траектории удаления зонда от образца может оказаться участок сильного адгезионного притяжения, которому соответствует потенциальная яма (точка 4) на профиле отклонений. После сильного адгезионного притяжения взаимодействие зонда с образцом пропадает, и отклонение кантилевера возвращается на базовый уровень (точка 5).
Использование прыжковой моды для обратной связи
Для обратной связи, поддерживающей в процессе растрового сканирования заданную
пользователем степень нежного касания между иглой и образцом, естественно использовать
в качестве критерия касания деформацию кантилевера в направлении от исследуемой
поверхности, означающую возникновение некоторой (заданной в качестве рабочей точки)
силы отталкивания острия от образца. Как и в контактном режиме AFM, эту силу следует
выбирать достаточно небольшой, чтобы избежать разрушения острия иглы и повреждения
образца. Работа в прыжковой моде, однако, выгодно отличается от классического
контактного режима тем, что в каждый очередной период подвода-отвода, длящийся всего
несколько миллисекунд, у прибора имеется возможность определить нулевое положение
недеформированного кантилевера. Измерение разности деформаций вместо измерения самой
деформации позволяет эффективно избавиться от дрейфов в положении кантилевера и в
сигнале датчика его деформации (как правило, работающего на оптическом принципе,
измеряя смещение зайчика лазерного луча, отраженного от верхней поверхности
кантилевера, с помощью четырехсегментного фотодиода). Благодаря этому, в качестве
рабочей точки экспериментатор может задать степень отклонения кантилевера значительно
меньшую, чем в обычном контактном режиме. В ходе AFM сканирования в контактном
режиме, которое может длиться несколько часов, положение «нуля» оптического датчика,
соответствующее недеформированному состоянию кантилевера и нулевой силе прижима,
может оказаться сбито механическими (в частности, термическими) и электрическими
дрейфами, спектр которых, как правило, имеет видд  . Регулярное пере-измерение
сигнала отклонения кантилевера в его заведомо свободном состоянии позволяет исключить вносимую дрейфами ошибку определения фактической силы прижима.
. Регулярное пере-измерение
сигнала отклонения кантилевера в его заведомо свободном состоянии позволяет исключить вносимую дрейфами ошибку определения фактической силы прижима.
Есть, однако, в таком измерении и некоторый недостаток: кантилевер, как и любая макроскопическая частица, находится в состоянии тепловых (броуновских) колебаний.
Амплитуда этих колебаний Z0 в среднем такова, что потенциальная энергия  отклонения иглы от положения равновесия в потенциале изгиба кантилевера равняется
отклонения иглы от положения равновесия в потенциале изгиба кантилевера равняется  , где k – жесткость кантилевера, T –температура, а kB – постоянная Больцмана.
При типичном значении жесткости леверов для контактных измерений
, где k – жесткость кантилевера, T –температура, а kB – постоянная Больцмана.
При типичном значении жесткости леверов для контактных измерений  эта
амплитуда термодинамических колебаний составляет около 64 пм. Для точного измерения
положения кантилевера требуется, таким образом, усреднение электрического сигнала за
время, по крайней мере превышающее период его колебаний на частоте изгибного резонанса.
Электрическое качество сигнала отклонения кантилевера тоже не бесконечно и тоже требует
некоторого времени для усреднения. Тем не менее, обе эти ошибки при мгновенном
измерении положения свободного кантилевера едва ли превышают амплитуду тепловых
колебаний кантилевера, которая явно меньше размера молекул, так что даже в худшем
случае максимальной ошибки опасность обломать иглу экспериментатору не грозит.
эта
амплитуда термодинамических колебаний составляет около 64 пм. Для точного измерения
положения кантилевера требуется, таким образом, усреднение электрического сигнала за
время, по крайней мере превышающее период его колебаний на частоте изгибного резонанса.
Электрическое качество сигнала отклонения кантилевера тоже не бесконечно и тоже требует
некоторого времени для усреднения. Тем не менее, обе эти ошибки при мгновенном
измерении положения свободного кантилевера едва ли превышают амплитуду тепловых
колебаний кантилевера, которая явно меньше размера молекул, так что даже в худшем
случае максимальной ошибки опасность обломать иглу экспериментатору не грозит.
Использование прыжковой моды для записи вообще кривых подвода
С точки зрения программиста и инженера, прыжковая мода состоит в регулярном подводе- отводе образца к игле, сопровождаемом записью силы отклонения кантилевера в каждый момент (его деформацией). Между тем, никто не мешает во время подвода-отвода записывать в память контроллера любые другие измеряемые параметры. Это может быть например ток между образцом и иглой (STM, SSRM) это может быть интенсивность сигнала комбинационного рассеяния под иглой (TERS), это может быть амплитуда и фаза упругого рассеяния света иглой в sSNOM..
Виды данных, предоставляемых прыжковой модой
Поскольку основным видом собираемых в процессе измерения данных является сила деформации кантилевера, прыжковая мода, как и классическая контактная мода AFM, может предоставить данные о топографическом рельефе образца. Системе обратной связи, подстраивающей высоту иглы по отношению к образцу, достаточно получить вертикальную координату столика с образцом, при которой в данной точке поверхности происходит отгиб кантилевера на заданную величину, и затем учесть это значение в следующей точке измерения. Необычным видом данных является предоставляемая прыжковой модой карта силы адгезии – силы, при которой в процессе отвода образца происходит его отрыв от иглы. Точное измерение деформации кантилевера в процессе подвода позволит получить карту локальной жесткости поверхности образца. «Вертикальное» смещение иглы известно из деформации кантилевера, а смещение образца в «вертикальном» направлении известно из положения сканирующего столика. Их разность равна глубине вдавливания кантилевера в поверхность, а силу вдавливания можно вычислить из деформации балки кантилевера. Прецизионное измерение деформации кантилевера навстречу образцу на этапе подвода дает экспериментатору карту параметров ветви притяжения на ван-дер-ваальсовой кривой.
Дополнительные соображения
В нескольких местах текста выше закон перемещения образца по отношению к игле во времени был назван гармоническим (синусоидальным). Между тем, это вовсе не обязательное требование, и совсем не непременная примета метода. В измерительной системе отсутствуют резонансы, вынуждающие пользователя ставить эксперимент именно на определенной частоте и работать потому именно в синусоидальном режиме периодического перемещения столика с образцом в направлении зондирующей иглы и от нее. Закон «вертикального» перемещения образца может по прихоти разработчика прибора оказаться любым. Ленивый аналоговый радист, вероятно, использует для изменения высоты образца во времени синусоидальный закон: аналоговая генерация синусоиды – самое простое занятие, а никакими проблемами ему за выбранный закон движения платить потом не придется. Ленивый цифровой радист с целью экономии сил вероятно напишет для контроллера алгоритм равномерного пилообразного движения: в таком случае индекс очередной точки измерения будет линейно переводиться в ее физическую координату (высоту сканирующего столика). Опытный пользователь AFM попросит такого программиста скруглить закон движения в точках смены направления перемещения, чтобы возникающий в верхней мертвой точке резкий стук не заставлял образец подпрыгивать на сканирующем столике (снижение в этот момент силы трения позволит образцу, лежащему на нем, хаотически перемещаться вбок). Культурный радиофизик, вероятно, сделает закон подвода и отвода столика таким, чтобы его движение происходило с переменной скоростью. Изменять прям на лету частоту периодического срабатывания АЦП, который измеряет входные сигналы (в первую очередь, деформацию кантилевера под действием сил притяжения и отталкивания образца и иглы), технически затруднительно. Между тем, некоторые участки кривой подвода хотелось бы с целью уменьшения шума измерить тщательно (совершив для этого много измерений входного сигнала, то есть вызвав много срабатываний АЦП, и усреднив потом результаты). Это означает, что в таком положении образца прибору придется провести достаточно много времени. Напротив того, менее интересные участки кривой подвода можно измерить кое-как (потратив на пребывание в них мало времени и совершив относительно немного измерений сигнала с помощью АЦП). Скорость подвода (отвода) образца к зондирующей игле на таких участках кривой подвода может быть сделана достаточно большой. Синусоидальное движение столика с этой точки зрения неоптимально: в верхушках синусоиды столик проводит много времени, а середину пути проскакивает относительно быстро.